前言
HashMap是按照对象的Hash值来存储或者读取,因此并没有先后顺序。处理hash 冲突时使用链表和红黑树(红黑树之后再细细研究)。
常量解释
size
size表示HashMap中存放KV的数量(为链表和树中的KV的总和)。
capacity
capacity译为容量。capacity就是指HashMap中桶的数量。默认值为16。一般第一次扩容时会扩容到64,之后好像是2倍。总之,容量都是2的幂。
loadFactor
loadFactor译为装载因子。装载因子用来衡量HashMap满的程度。loadFactor的默认值为0.75f。计算HashMap的实时装载因子的方法为:size/capacity,而不是占用桶的数量去除以capacity。
threshold
threshold表示当HashMap的size大于threshold时会执行resize操作。 threshold=capacity*loadFactor
构造器
无参数构造器
设置装载因子为0.75。
public HashMap() {
this.loadFactor = DEFAULT_LOAD_FACTOR; // all other fields defaulted
}
有参构造器
设置初始容量,这个在阿里规约里有说过,尽量在创建Map时设置他的初始容量,然而这个容量的设置是有讲究的。必须为2的倍数。假如不是2的倍数则会在计算哈希值时冲突过于频繁,造成性能问题。例如HashMap的初始值为16,16*0.75=12,也就是说当插入的值超于12则会进行扩容(扩容为2的倍数)
public HashMap(int initialCapacity) {
this(initialCapacity, DEFAULT_LOAD_FACTOR);
}
put方法
put方法插入将指定值与该映射中的指定键相关联。如果映射先前包含键的映射,则将替换旧值。
public V put(K key, V value) {
return putVal(hash(key), key, value, false, true);
}
下面来看putVal方法
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
if ((tab = table) == null || (n = tab.length) == 0)
n = (tab = resize()).length;
if ((p = tab[i = (n - 1) & hash]) == null)//根据key计算hash值得到插入索引的位置i
//判断table[i]是否为空,为空则直接插入
tab[i] = newNode(hash, key, value, null);
else {
Node<K,V> e; K k;//新定义一个变量
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
e = p;//假如key是存在的则直接插入
else if (p instanceof TreeNode)
//判断是否为tree类型,如果是则插入树中
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
else {
//遍历列表准备插入值
for (int binCount = 0; ; ++binCount) {
if ((e = p.next) == null) {
p.next = newNode(hash, key, value, null);
//假如链表大于8则直接转换为树并退出循环
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
treeifyBin(tab, hash);
break;
}
//找到对应的key则退出循环
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
break;
p = e;
}
}
if (e != null) { //现有键的映射
V oldValue = e.value;
if (!onlyIfAbsent || oldValue == null)
e.value = value;//将值存入
afterNodeAccess(e);
return oldValue;
}
}
++modCount;//增删改的次数,由于方法是线程不安全的
if (++size > threshold)//capacity*loadFactor 容量乘上装载因子0.75或其他值
resize();//扩容
afterNodeInsertion(evict);
return null;
}
有几个细节
-
可以发现他并没有用求余的算法,是因为求余的速度是很慢的 ,而是用这种方法==》》》》if ((p = tab[i = (n - 1) & hash]) == null) 这是因为:a % b == (b-1) & a ,当b是2的指数时,等式成立。这个n 是数组的长度,之前说过了长度都是2的倍数,因此这里是可以用 & 与运算这种方法的。这将会大大提高运行效率。
-
插入同一个位置时(也就是hash冲突时)刚开始会使用链表向后连接,当满足两个条件才会进行转为树形
①当同一个位置冲突大于8次时(也就是同一个地点的链表长度大于8时)②当前容量大于64(大于MIN_TREEIFY_CAPACITY的值)同时满足两个条件时才会转为树形结构。因为树形结构的查询速度是优于一个长长的链表的。
-
可以发现很多方法使用的是默认的访问权限,并没有使用private或者public。这样可以让包内的其他类可以使用。但我们平常写的时候都会用private修饰一下。
-
这里使用的树是红黑树,等之后在研究研究
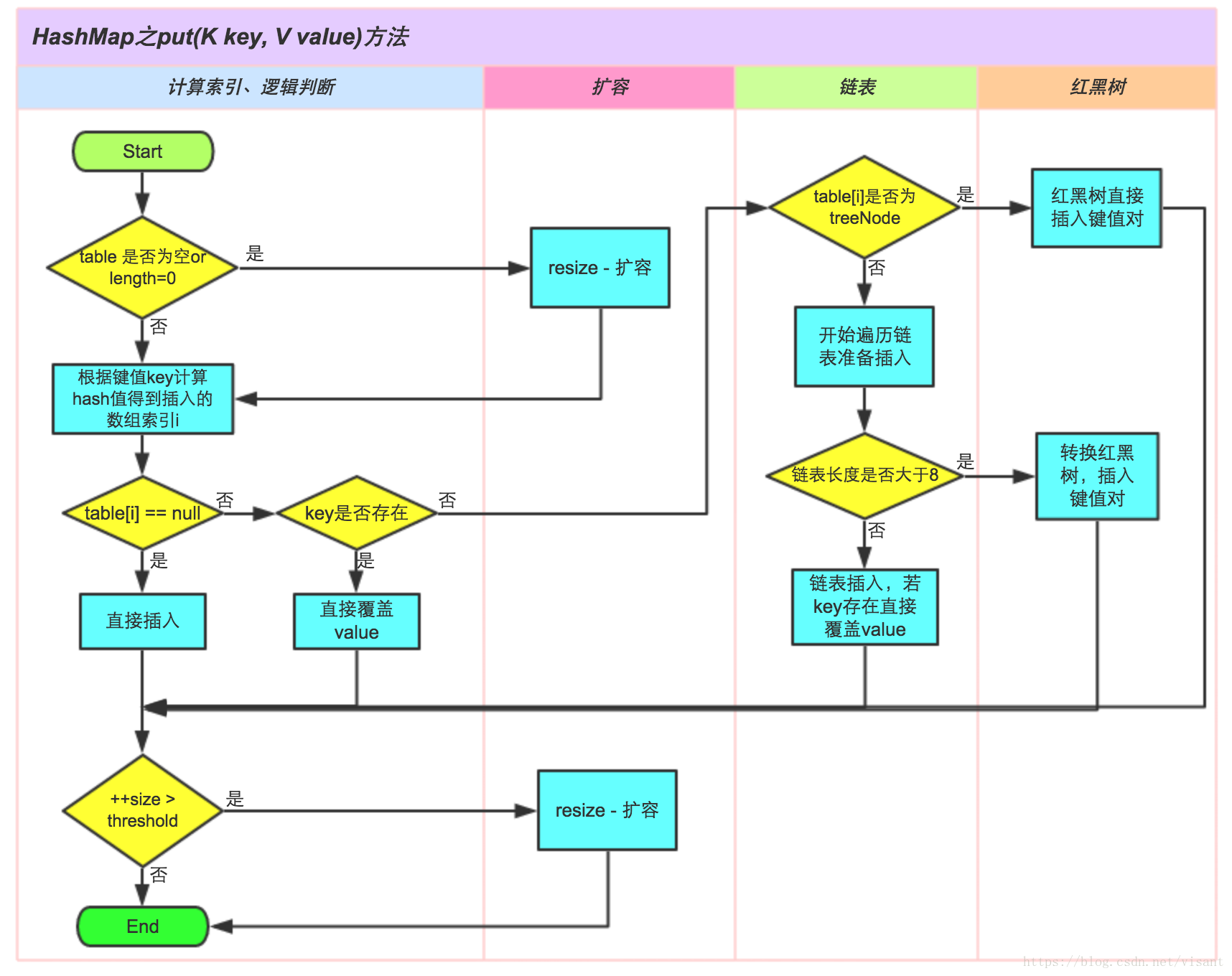
下面是这个方法的时序图。
下面来测试一下这个方法
向map里put50个对象打个断点调试一下
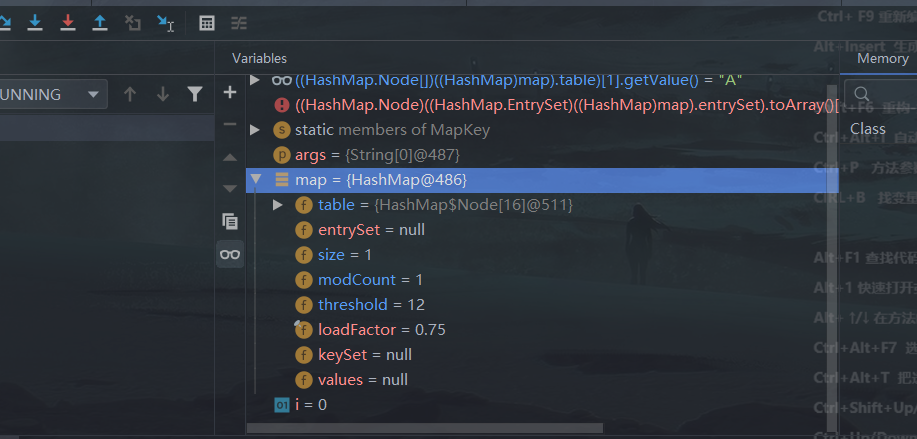
刚刚插入一个值时,threshold为12,装载因子为0.75。
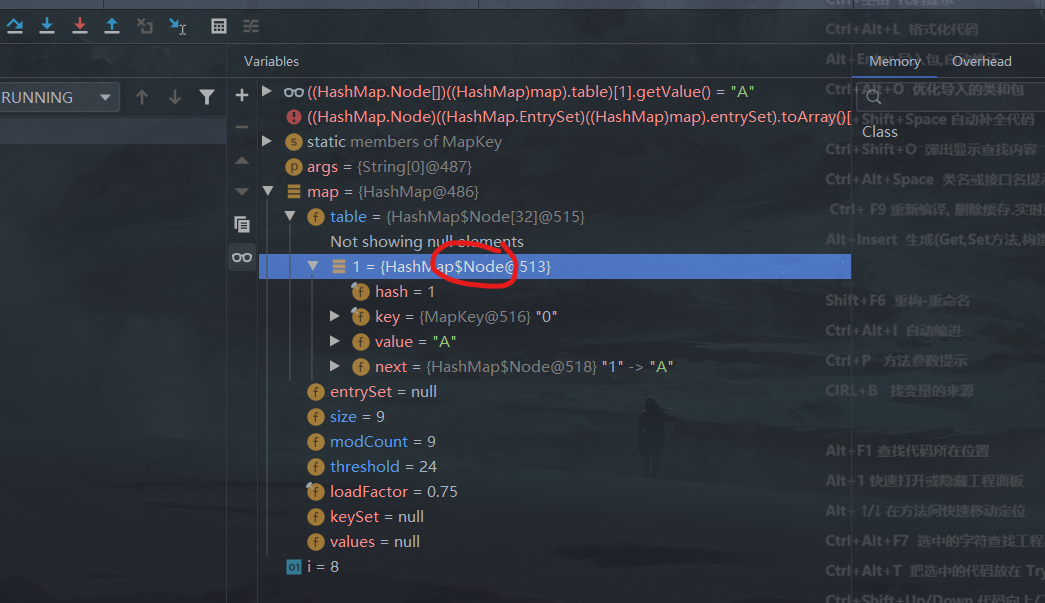
插入9个值时扩容到32.但是还是链表结构并没有转为树形结构
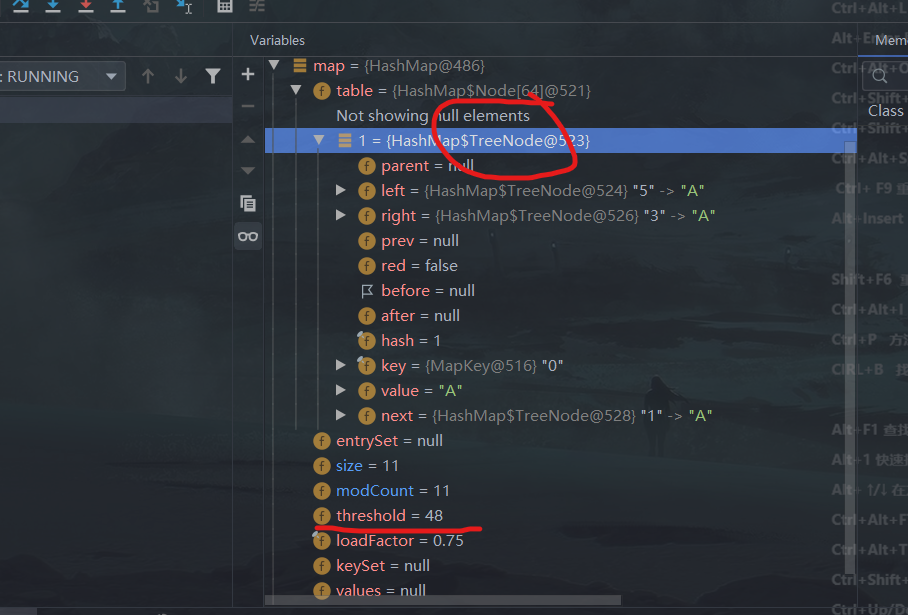
当扩容到64(48/0.75)时可以看见之前的数据结构已经变为树形结构了。
可以看出插入值时数据结构的转换以及扩容都有很多方面要考虑。
其他方法和类之后再完善。。。